
LoadshineBDD CL86C CLOSE LOOP STEPPER DRV
10 997 ₽
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
1
Загружаем для вас...
Для B2B-заказов цена, срок и состав поставки фиксируются в счёте. Каталог не является публичной офертой. НДС не облагается (продавец применяет УСН).
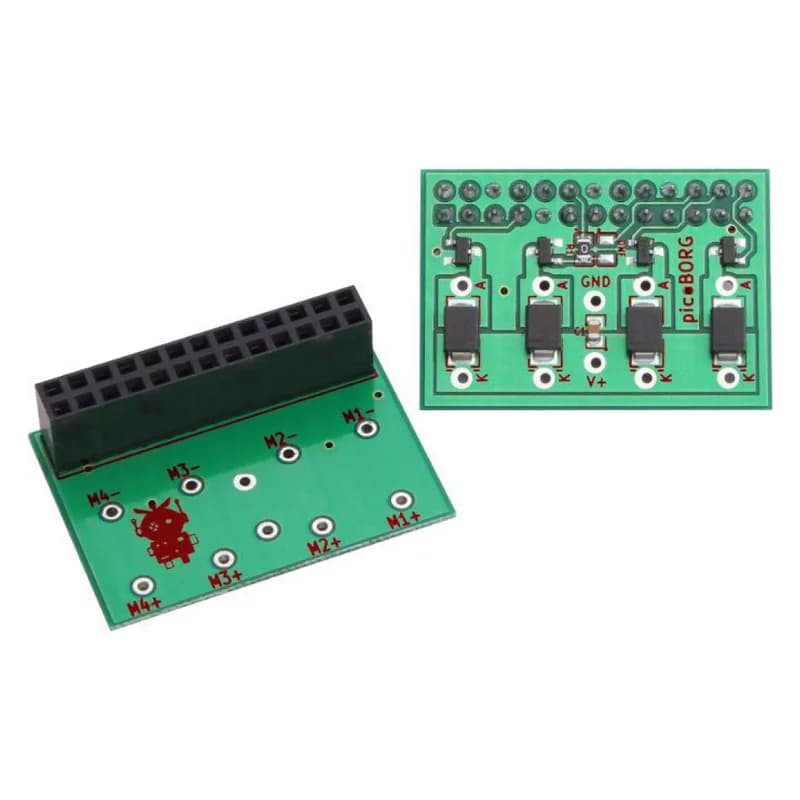
PicoBorg — это ультракомпактный контроллер двигателя для Raspberry Pi! С PicoBorg вы можете включать и выключать вентиляторы, двигатели, соленоиды или реле на Raspberry Pi. Имеется 4 драйвера нижнего плеча, поэтому вы можете включать и выключать 4 устройства, и одно устройство подключено к выводу PWM Pi, поэтому вы можете изменять скорость этого двигателя! Доступ к управлению двигателем осуществляется через простой графический интерфейс, который можно установить, выполнив следующие действия.
| Тип | Motor / Actuator |
|---|---|
| Платформа | Raspberry Pi |
| Шина данных | CAN |
| Производитель | PiBorg |
PicoBorg - Контроллер четырехмоторного двигателя — под заказ в каталоге Драйверы моторов бренда PiBorg, модель PicoBorg - Quad Motor Controller.
Технические параметры: Тип: Motor / Actuator; Платформа: Raspberry Pi; Шина данных: CAN; Производитель: PiBorg. Цена — 718 ₽. Доставка по России, отгрузка для юридических лиц, КП по запросу.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
Цена для справки. Окончательная цена — в счёте. Не публичная оферта.
По товару «PicoBorg - Контроллер четырехмоторного двигателя» пока нет опубликованных отзывов покупателей. Зарегистрированные пользователи смогут оставить отзыв после покупки.
Войти и написатьМы не публикуем сгенерированные оценки и не размечаем отзывы в JSON-LD, пока нет подтвержденных отзывов после покупки.
Шаговый двигатель (NEMA 17/23) точно позиционируется по числу шагов без обратной связи, удобен для CNC и 3D-печати, но теряет момент на высоких оборотах. Сервопривод держит положение по энкодеру, даёт высокий момент и динамику. Коллекторный DC-мотор прост и дёшев для непрерывного вращения. Выбор зависит от требований к точности позиционирования, моменту и скорости.


































